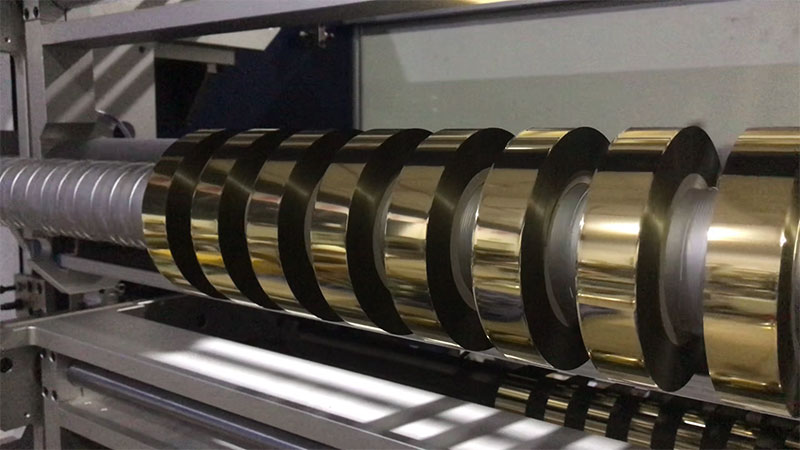
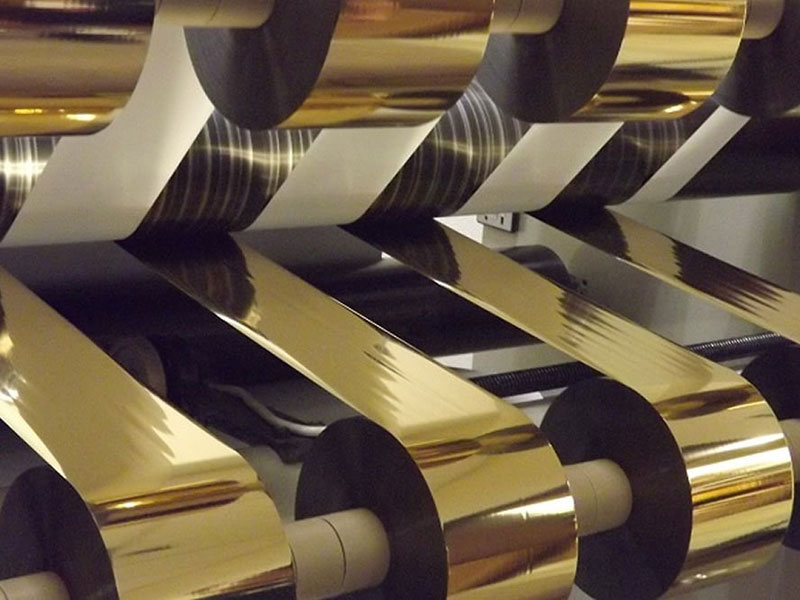
ในการแปรรูปวัสดุฟิล์มที่มีมูลค่าเพิ่มสูง เช่น ฟอยล์ปั๊มร้อน อะลูมิเนียมไฟฟ้าเคมี ฟิล์มเลเซอร์ ฯลฯ คุณภาพการม้วนของเครื่องตัดจะกำหนดผลผลิตและประสิทธิภาพของการพิมพ์ปั๊มร้อนในขั้นตอนถัดไปโดยตรง อย่างไรก็ตาม การเบี่ยงเบนของการม้วน (ที่รู้จักกันทั่วไปว่า "การม้วนไม่สม่ำเสมอ" และ "การม้วนแบบล้อหอคอย") เป็นหนึ่งในปัญหาที่พบบ่อยที่สุดในอุตสาหกรรม เมื่อเกิดการแกว่งแบบคดเคี้ยวหรือปลายกระดาษไม่เรียบ อาจทำให้วัสดุเสียหาย ใบมีดตัดเสียหาย หรือแม้กระทั่งทำให้กระดาษขาดได้
ปฏิกิริยาแรกของหลายคนคือการปรับความขนานของเซ็นเซอร์แก้ไขหรือลูกกลิ้งนำทาง แต่บ่อยครั้งที่อาการไม่หายไป หัวใจสำคัญที่กำหนดความเรียบร้อยของหน้าตัดปลายม้วนอย่างแท้จริงคือเสถียรภาพแบบไดนามิกของแรงดึงในการม้วน นั่นคือความเร็วในการตอบสนองและความแม่นยำในการควบคุมของวงจรปิดแรงดึง ด้านล่างนี้ เราจะวิเคราะห์อย่างเป็นระบบถึงวิธีการกำจัดความเบี่ยงเบนในการม้วนผ่าน "การรักษาเสถียรภาพอย่างรวดเร็วของวงจรปิดแรงดึง" ตั้งแต่กลไกทางกายภาพไปจนถึงการปฏิบัติทางวิศวกรรม

1. เหตุใดความผันผวนของแรงตึงจึงนำไปสู่ความเบี่ยงเบนอย่างหลีกเลี่ยงไม่ได้?
คุณสมบัติของฟอยล์ปั๊มร้อน ได้แก่ ความหนาบาง (6~20 ไมโครเมตร) ผิวเรียบ การยืดตัวต่ำ และความแข็งแกร่งต่ำ ในระหว่างกระบวนการตัดและม้วน ฟอยล์จะถูกตัดเป็นแถบแคบๆ หลายแถบจากขดลวดขนาดใหญ่เพียงขดเดียว และแต่ละแถบแคบๆ จะถูกม้วนแยกกัน
หากแรงดึงกลับผันผวนเป็นระยะ (เช่น แรงดึงกลับ 5N ทุกๆ 10 วินาที ±) จะเกิดปฏิกิริยาลูกโซ่ดังต่อไปนี้:
1. การลื่นไถลแบบยืดหยุ่น:ชั้นฟิล์มทำให้เกิดการเลื่อนตัวตามแนวแกนเล็กน้อยบนแกนขดลวด และทิศทางการเลื่อนตัวของแต่ละรอบนั้นเป็นแบบสุ่ม ส่งผลให้เกิดการเยื้องศูนย์ที่หน้าตัดของขดลวด
2. ความไม่สมดุลของแรงด้านข้างความผันผวนของแรงตึงจะทำให้เกิดการกระจายความเค้นที่ไม่สม่ำเสมอในจุดต่างๆ ตามทิศทางขวางของเยื่อ และเยื่อจะ "เคลื่อนตัว" ไปทางด้านที่มีแรงตึงสูงโดยอัตโนมัติ
3. แกนหลวมชั้นในจะคลายตัวหลังจากแรงดึงนานเกินไป และไม่สามารถซ่อมแซมตัวเองได้หลังจากขดลวดเบี่ยงเบน เมื่อแรงดึงสูงเกินไป ฟิล์มจะถูกยืดและเสียรูป ซึ่งนำไปสู่การเคลื่อนตัวระหว่างชั้นด้วย
ดังนั้น วงจรควบคุมแรงตึงแบบปิดจึงไม่ใช่เพียงแค่ "การควบคุมแรงตึงคงที่" แต่เป็นระบบเซอร์โวที่ต้องตอบสนองอย่างรวดเร็ว โดยไม่มีการโอเวอร์ชูต และทนต่อการรบกวน
2. จุดบอดสามจุดของการควบคุมแรงตึงแบบดั้งเดิม
เครื่องตัดแผ่นโลหะหลายเครื่องใช้ระบบควบคุมแรงบิดแบบวงเปิดหรือระบบควบคุมแรงบิดแบบวงปิด PID ซึ่งง่ายต่อการสูญเสียการควบคุมในสถานการณ์ต่อไปนี้:
• เปลี่ยนขนาดเส้นผ่านศูนย์กลางม้วนได้อย่างรวดเร็ว:จากม้วนที่ว่างเปล่าไปจนถึงม้วนที่เต็ม อัตราส่วนของขนาดม้วนต่อเส้นผ่านศูนย์กลางอาจสูงถึง 5:1 และโมเมนต์ความเฉื่อยในการหมุนจะเปลี่ยนแปลงอย่างมาก หากค่าพารามิเตอร์ PID คงที่ การสั่นสะเทือนจะเกิดขึ้นในระหว่างการหมุนขนาดเล็ก และการตอบสนองจะช้าลงในระหว่างการหมุนขนาดใหญ่
• กระบวนการเร่งความเร็วและลดความเร็ว: ในระหว่างการเริ่ม-หยุด และความเร็วในการยก แรงเฉื่อยจะซ้อนทับกับแรงดึง ทำให้เกิดแรงดึงพุ่งสูงขึ้นอย่างฉับพลัน และส่งผลให้เกิด "การกระโดดของชั้นกระดาษ" อย่างทันทีเมื่อกรอถอยหลัง
• รอยต่อหรือความหนาของวัสดุที่ไม่สม่ำเสมอ: ฟอยล์ปั๊มร้อนมักมีความหนาของกระดาษหรือสารเคลือบที่ไม่คงที่ ซึ่งเป็นการรบกวนแบบขั้นบันไดต่อวงจรปิดของแรงตึง ระบบควบคุม PID ทั่วไปใช้เวลา 2-3 รอบการผันผวนในการฟื้นตัว และความคลาดเคลื่อนจะเกิดขึ้นระหว่างการผันผวนเหล่านี้

3. กลยุทธ์ "วงปิดสามขั้นตอน" เพื่อการรักษาเสถียรภาพอย่างรวดเร็ว
เพื่อขจัดความคลาดเคลื่อน เวลาในการปรับวงจรปิดของแรงดึงจะต้องลดลงให้เหลือเท่าที่สมบัติของวัสดุจะเอื้ออำนวย (โดยทั่วไปต้องใช้เวลา ≤ 0.5 วินาทีโดยไม่เกิดการโอเวอร์ชูต) วิธีการมีดังนี้:
ขั้นตอนที่ 1: นำสถาปัตยกรรมแบบวงปิดคู่ "ความเร็ว + กระแส" มาใช้
• วงแหวนด้านนอก (วงแหวนความเร็ว): กำหนดค่าโดยตัวเข้ารหัสหรือเซ็นเซอร์ความเร็วเชิงเส้น เพื่อหลีกเลี่ยงการเคลื่อนที่ช้าๆ ในโหมดแรงบิดล้วนๆ
• วงแหวนด้านใน (วงแหวนกระแส/วงแหวนแรงบิด): การตอบสนองความเร็วสูง (ระดับมิลลิวินาที) ของเซอร์โวไดรฟ์จะควบคุมกำลังขับของมอเตอร์โดยตรง
• ประเด็นสำคัญมอเตอร์สำหรับพันขดลวดต้องทำงานในโหมดควบคุมแรงบิด แต่แรงบิดอ้างอิงจะถูกคำนวณแบบเรียลไทม์โดยใช้ค่าความตึงที่ตั้งไว้ และมีการเพิ่มการจำกัดความเร็วเพื่อเป็นมาตรการป้องกันความปลอดภัย
ขั้นตอนที่ 2: การป้อนกลับแบบไดนามิกจะชดเชยเส้นผ่านศูนย์กลางและความเฉื่อยของขดลวด
• การคำนวณเส้นผ่านศูนย์กลางของม้วนสายเคเบิลในปัจจุบันแบบเรียลไทม์ (โดยใช้อัตราส่วนความเร็วเชิงเส้นต่อความเร็วเชิงมุม หรือเซ็นเซอร์อัลตราโซนิก)
• การอัปเดตค่าพารามิเตอร์สองค่าแบบเรียลไทม์ โดยอิงตามเส้นผ่านศูนย์กลางของม้วน:
◦ สัมประสิทธิ์การชดเชยแรงบิด: T = F × (D/2) โดยที่ F คือแรงดึงที่ตั้งไว้ และ D คือเส้นผ่านศูนย์กลางของขดลวดแบบเรียลไทม์
◦ การป้อนกลับความเฉื่อย: ส่วนประกอบแรงบิดเพิ่มเติม ΔT = J × α จะถูกเพิ่มเข้ามาเมื่อมีการเร่งความเร็วหรือลดความเร็ว (J คือโมเมนต์ความเฉื่อยของขดลวดปัจจุบัน α คือความเร่งเชิงมุม)
• ด้วยวิธีนี้ ความผันผวนของแรงตึงที่เกิดขึ้นจริงสามารถควบคุมได้ภายใน ±3% แม้ในสภาวะที่ความเร็วสูงสุดและขึ้นลงอย่างต่อเนื่อง
ขั้นตอนที่ 3: การปรับ PID อัตโนมัติ + การระงับการรบกวนความถี่ต่ำ
• สำหรับความผันผวนของแรงดึงที่เกิดขึ้นทั่วไปในช่วง 0.5~5 เฮิรตซ์ในแผ่นฟอยล์ปั๊มร้อน (เช่น ความเยื้องศูนย์ของลูกกลิ้งดึง ความไม่สมดุลของแกนขยายอากาศ) จะมีการติดตั้งตัวกรองแบบแบนด์พาสหรือตัวกรองแบบน็อตช์ไว้ในตัวควบคุม PID
• การปรับค่า PID แบบฟัซซีหรือการปรับค่าอ้างอิงแบบจำลอง: ปรับค่าเกนมาตราส่วน Kp และเวลาการรวม Ti โดยอัตโนมัติเมื่อการเปลี่ยนแปลงเส้นผ่านศูนย์กลางปริมาตรเกินเกณฑ์ที่กำหนด ตัวอย่างเช่น ลดค่า Kp เพื่อป้องกันแรงกระแทกเมื่อปริมาตรเล็ก และเพิ่มค่า Kp เพื่อเพิ่มความสามารถในการต้านทานการรบกวนเมื่อปริมาตรใหญ่
• ข้อมูลที่วัดได้แสดงให้เห็นว่า เวลาในการปรับแบบวงปิดที่ได้รับการปรับให้เหมาะสมที่สุด สามารถลดลงจาก 2-3 วินาที เหลือต่ำกว่า 0.3 วินาที เมื่อเทียบกับการควบคุมแบบดั้งเดิม และไม่มีการโอเวอร์ชูต

ประการที่สี่ “ภัยร้ายที่มองไม่เห็น” ทั้งสี่ประการในการดำเนินโครงการ
แม้ว่าอัลกอริทึมทางทฤษฎีจะสมบูรณ์แบบ แต่ก็อาจยังมีความคลาดเคลื่อนเกิดขึ้นได้ในทางปฏิบัติ รายละเอียดต่อไปนี้ไม่ควรมองข้าม:
1. ตำแหน่งการติดตั้งเซ็นเซอร์วัดแรงดึง: ต้องอยู่ใกล้กับลูกกลิ้งนำทางตัวสุดท้ายก่อนการพัน และระยะห่างของตลับลูกปืนลูกกลิ้งต้องไม่เกิน 0.01 มม. สายสัญญาณเซ็นเซอร์ควรอยู่ห่างจากสายไฟของตัวแปลงความถี่
2. แรงดันลมของเพลาแกนรอกสำหรับแกนขนาด 3 นิ้วหรือ 6 นิ้ว แรงดันอากาศต้องสม่ำเสมอและคงที่ (แนะนำให้ใช้ตัวควบคุมแรงดันแบบวงปิด) หากแรงดันไม่เพียงพอ ชั้นในจะลื่น และหากแรงดันสูงเกินไป แกนกระดาษจะเสียรูป
3. ลูกกลิ้งลอยตัวอิสระสำหรับแต่ละแถบแคบหลังจากการตัดสำหรับแถบโลหะที่แคบมาก โดยมีความกว้างน้อยกว่า 20 มม. แนะนำให้เพิ่มลูกกลิ้งลอยตัวขนาดเล็กในแต่ละสถานีการม้วน เพื่อช่วยลดแรงกระแทกทางกลโดยใช้แรงโน้มถ่วงหรือกระบอกสูบที่มีแรงเสียดทานต่ำ
4. จังหวะการแก้ไขขอบและการควบคุมความตึงแบบวงปิด: การแก้ไขจะเปลี่ยนแปลงความยาวของเส้นทางของเมมเบรนชั่วคราว ซึ่งจะรบกวนแรงตึง จำเป็นต้องตั้งค่าใน PLC: ในขณะที่ทำการแก้ไข ตัวควบคุมแรงตึง PID จะหยุดการทำงานของเทอมอินทิกรัลชั่วคราว แล้วจึงกลับมาทำงานต่อเมื่อการแก้ไขเสร็จสมบูรณ์
5. การตรวจสอบผลลัพธ์: จาก "มองเห็นได้ด้วยตาเปล่า" ไปสู่ "ข้อมูลที่วัดได้"
สามารถประเมินค่าเบี่ยงเบนการพันขดลวดที่เหมาะสมที่สุดได้ในเชิงปริมาณ:
• การเยื้องศูนย์ของหน้าตัด: ≤±0.5 มม. (สภาวะการทำงานปกติ) / ≤±1.0 มม. (สภาวะการทำงานที่มีการเร่งและลดความเร็ว)
• จุดสูงสุดของการผันผวนของแรงตึง:≤ ±5% ของค่าที่ตั้งไว้
• เวลาในการปรับตัว: ≤0.5 วินาที (นับจากเวลาที่เกิดการรบกวนจนถึงการกลับสู่สภาวะสมดุล)
ขอแนะนำให้ผู้ใช้ทำการทดสอบแบบ "ขั้นบันได" ในการผลิตจริง: เปลี่ยนค่าความเร็วในการกรอเทปอย่างรวดเร็วโดยเพิ่มขึ้นทีละ ±10% บันทึกกราฟแรงดึงด้วยเครื่องเก็บข้อมูลความเร็วสูง และสังเกตค่าเกินและจำนวนการแกว่ง หากรูปคลื่นสามารถลู่เข้าภายในหนึ่งรอบ แสดงว่าการรักษาเสถียรภาพแบบวงปิดนั้นได้มาตรฐาน
บทส่งท้าย
ความคลาดเคลื่อนในการม้วนของเครื่องตัดฟอยล์ปั๊มร้อนนั้นไม่ใช่ปัญหาของการ "แก้ไข" แต่เป็นปัญหาของ "แรงตึง" การแก้ปัญหาการม้วนแบบคดเคี้ยวอย่างแท้จริงนั้น จำเป็นต้องทำให้ระบบควบคุมแรงตึงแบบวงปิดมีคุณสมบัติหลักสามประการ ได้แก่ การตอบสนองที่รวดเร็ว การเปลี่ยนแปลงขนาดเส้นผ่านศูนย์กลางของม้วนอย่างเหมาะสม และการลดการรบกวนทางกล สำหรับผู้ผลิตอุปกรณ์แล้ว นี่ไม่ใช่แค่เรื่องของการเปลี่ยนตัวควบคุม PID เท่านั้น แต่ยังเป็นโครงการที่เป็นระบบเกี่ยวกับการขับเคลื่อนเซอร์โว ความแข็งแกร่งทางกล และความแม่นยำของเซ็นเซอร์ เมื่อปลายม้วนของคุณเรียบเนียนเหมือนมีด นั่นหมายความว่าคุณได้เชี่ยวชาญแก่นแท้ของการควบคุมแรงตึงแล้ว


 เครื่องตัดฟอยล์เย็น
เครื่องตัดฟอยล์เย็น เครื่องกรอริบบิ้นพิมพ์การ์ด
เครื่องกรอริบบิ้นพิมพ์การ์ด เครื่องตัดริบบิ้นพิมพ์การ์ด
เครื่องตัดริบบิ้นพิมพ์การ์ด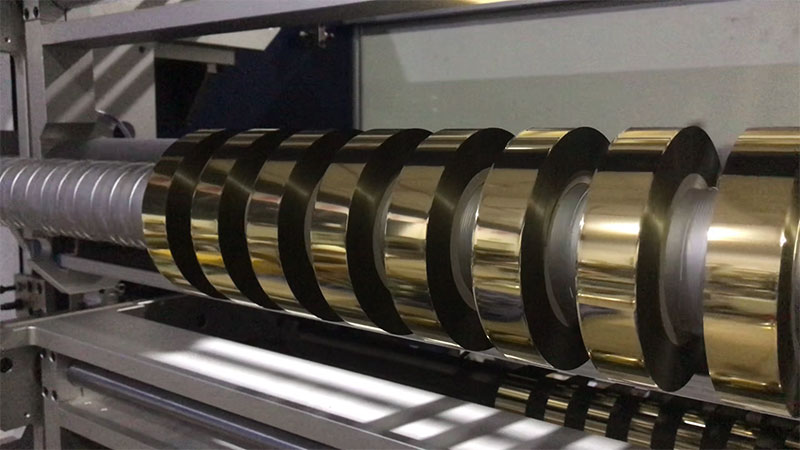 เครื่องตัดฟอยล์โฮโลแกรม
เครื่องตัดฟอยล์โฮโลแกรม เครื่องตัดฟอยล์ปั๊มร้อน (RSDS7H) 1350
เครื่องตัดฟอยล์ปั๊มร้อน (RSDS7H) 1350 เครื่องตัดฟอยล์ปั๊มร้อน RSDS7H 1350 PLUS
เครื่องตัดฟอยล์ปั๊มร้อน RSDS7H 1350 PLUS เครื่องตัดฟอยล์ปั๊มร้อน
เครื่องตัดฟอยล์ปั๊มร้อน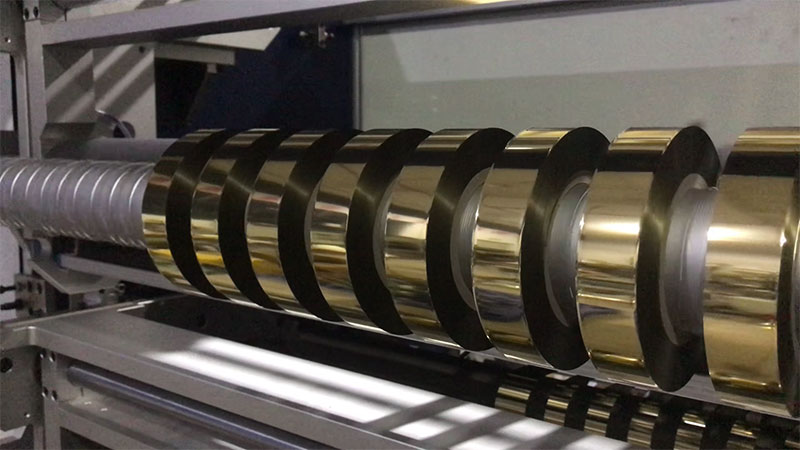 เครื่องตัดฟอยล์สำหรับงานพิมพ์สกรีน
เครื่องตัดฟอยล์สำหรับงานพิมพ์สกรีน





